




AlphaBot2 robot building kit for Raspberry Pi 3 Model B
- Mã sản phẩm: AlphaBot2-Pi (EN)
- Nhà sản xuất: Waveshare
- Website hỗ trợ: https://www.proe.vn
4.900.000₫
AlphaBot2 robot building kit for Pi, with controller Raspberry Pi 3 Model B
Overview
This AlphaBot2 robot kit is designed to use with Raspberry Pi 3 Model B. It features rich common robot functions including line tracking, obstacle avoiding, Bluetooth/infrared/WiFi remote control, video monitoring, etc.
Thanks to the highly integrated modular design, it is fairly easy to assemble by a snap, no soldering, no wiring. After a few minutes spent on hardware assembing, you're almost there, our open source demo codes is ready to help you get started fast.
Raspberry Pi 3 Features
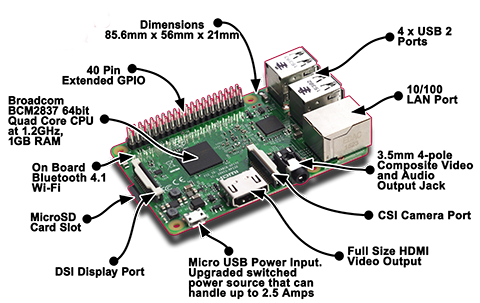
- BCM2837, 1.2GHz 64-bit quad-core ARM Cortex-A53
- 1GB RAM
- 10/100 Ethernet port
- 802.11n WiFi NIC
- Bluetooth 4.1 & Bluetooth Low Energy (BLE)
- HDMI port
- USB 2.0 interface x 4
- Micro SD card slot
- Combined 3.5mm audio jack and composite video
- 40-pin GPIO interface
- Camera interface (CSI)
- Display interface (DSI)
- Upgraded power management, supports more peripherals (requires a 2.5A power supply or above)
AlphaBot2 Features
AlphaBot2 employs a 2-layer structure to provide excellent stability and compatibility.
AlphaBot2-Base, the lower base chassis:
- 5-ch infrared sensor, analog output, combined with PID algorithm, stable line tracking
- Onboard modules like line tracking, obstacle avoiding, needs no messy wiring
- TB6612FNG dual H-bridge motor driver, compared with L298P, it's more efficient, more compact, and less heating
- N20 micro gear motor, with metal gears, low noise, high accuracy
- Onboard RGB LEDs, true color lighting, pretty cool
AlphaBot2-Pi, the upper adapter board for controller:
- LM2596 voltage regulator, provides the Pi with stable 5V power
- TLC1543 AD acquisition chip, allows the Pi to use analog sensors
- PCA9685 servo controller, make it more smoothly to rotate the pan head
- CP2102 UART converter, easy for controlling the Pi via UART
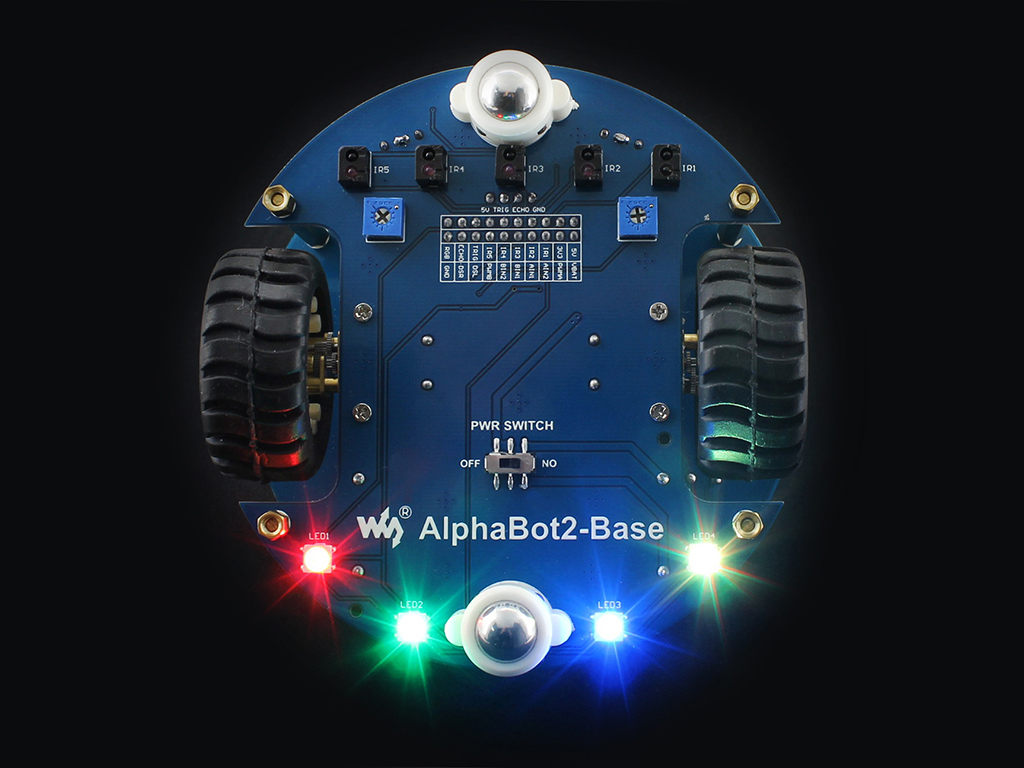
What's on the AlphaBot2-Base
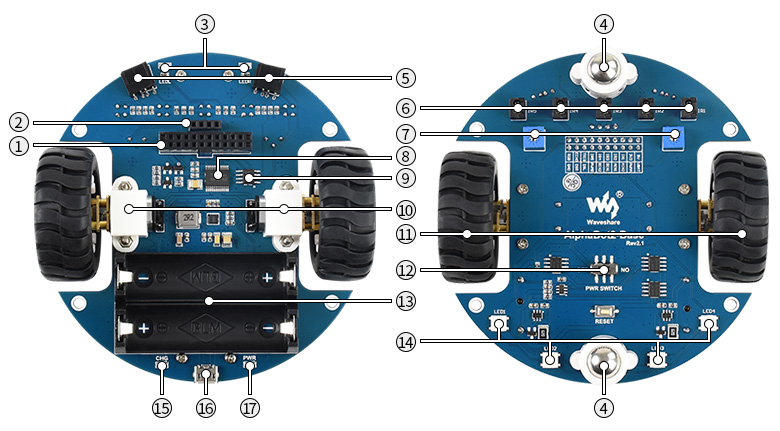
- AlphaBot2 control interface: for connecting sorts of controller adapter board
- Ultrasonic module interface
- Obstacle avoiding indicators
- Omni-direction wheel
- ST188: reflective infrared photoelectric sensor, for obstacle avoiding
- ITR20001/T: reflective infrared photoelectric sensor, for line tracking
- Potentiometer for adjusting obstacle avoiding range
- TB6612FNG dual H-bridge motor driver
- LM393 voltage comparator
- N20 micro gear motor reduction rate 1:30, 6V/600RPM
- Rubber wheels diameter 42mm, width 19mm
- Power switch
- Battery holder: supports 14500 batteries
- WS2812B: true color RGB LEDs
- Power indicator
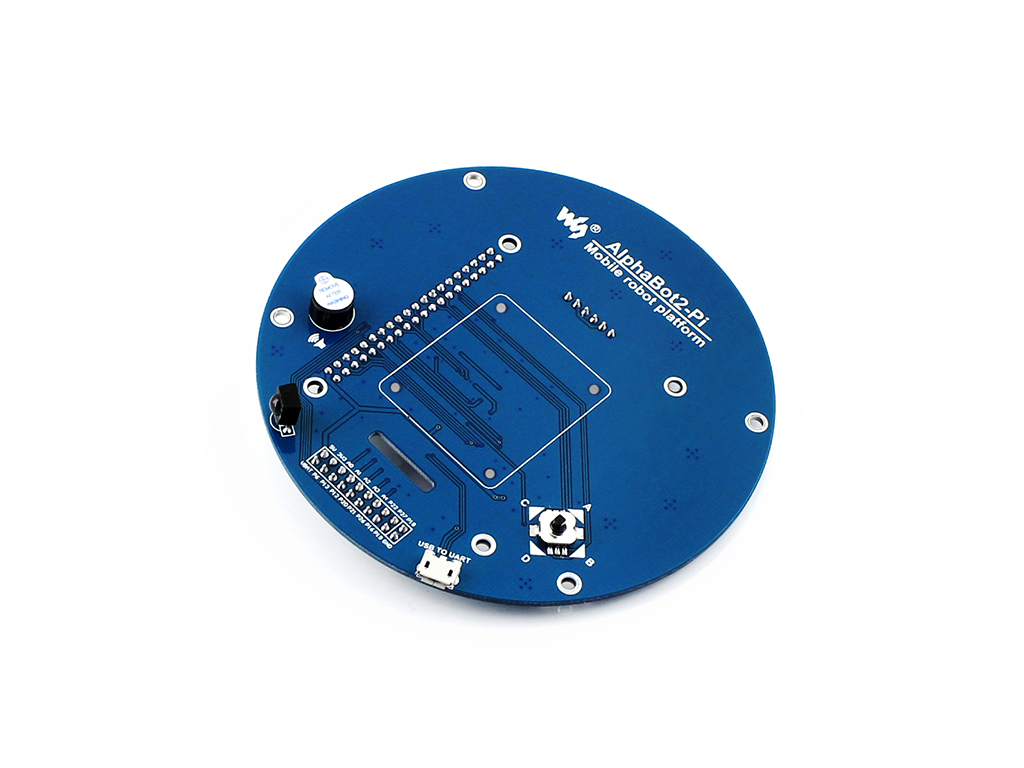
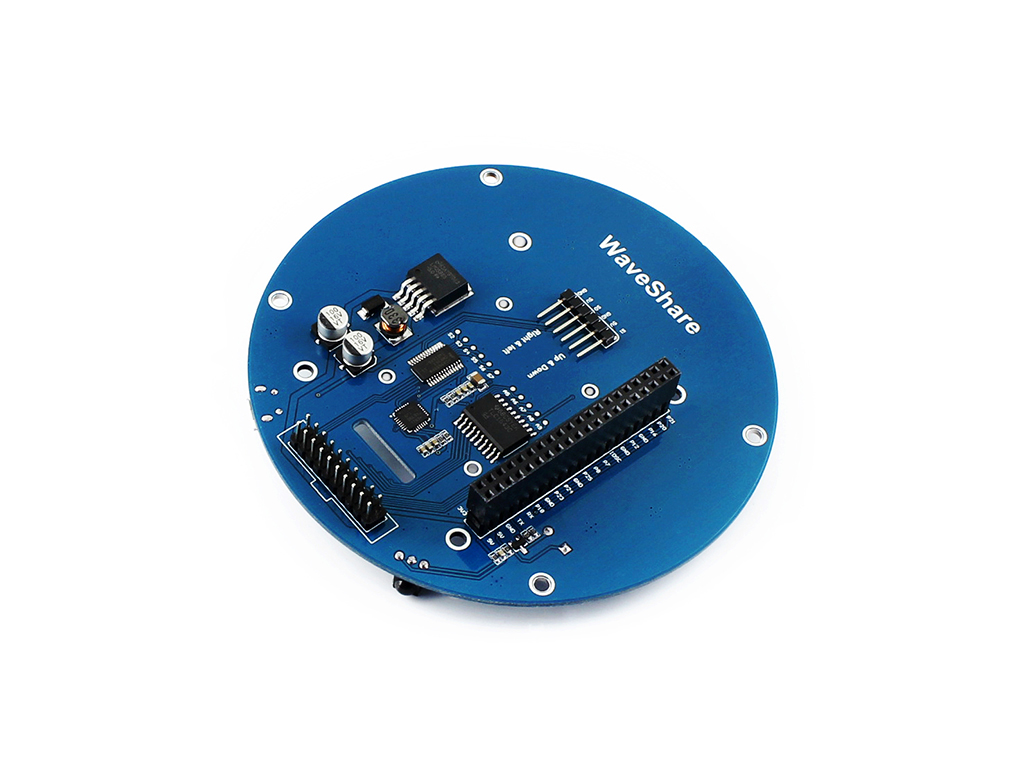
What's on the AlphaBot2-Pi
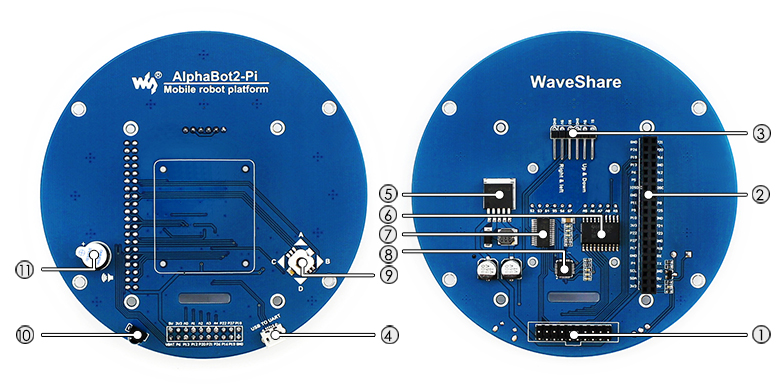
- AlphaBot2 control interface: for connecting AlphaBot2-Base
- Raspberry Pi interface: for connecting Raspberry Pi 3 Model B
- Servo interface
- USB TO UART: easy for controlling the Pi via UART
- LM2596: 5V voltage regulator
- TLC1543: 10-bit AD acquisition chip, allows the Pi to use analog sensors
- PCA9685: servo controller, make it more smoothly to rotate the pan head
- CP2102: USB TO UART converter
- Joystick
- IR receiver
- Buzzer
Photos


AlphaBot2-Pi top view
AlphaBot2-Pi bottom view

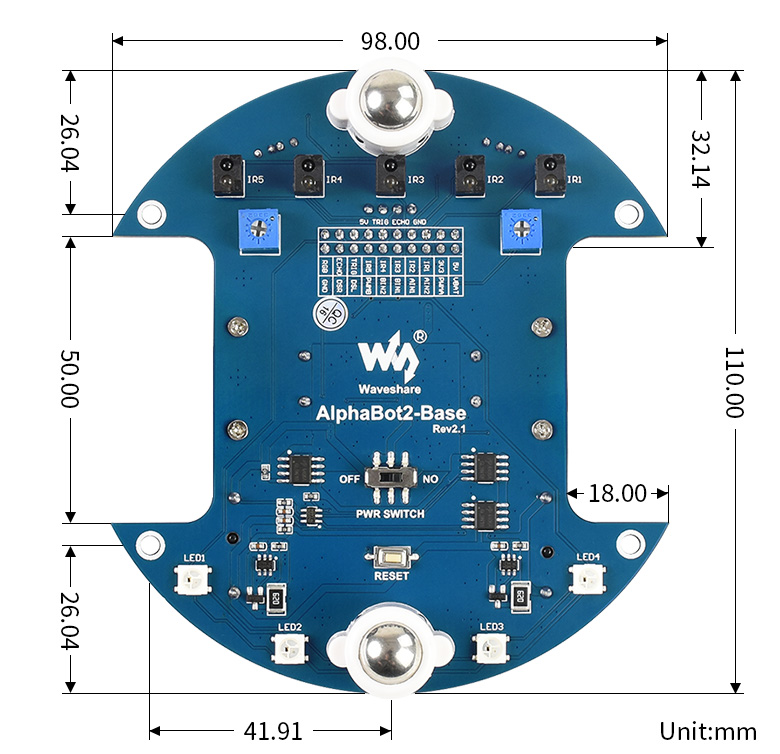
AlphaBot2-Base top view

AlphaBot2-Base bottom view

AlphaBot2-Pi robot front view
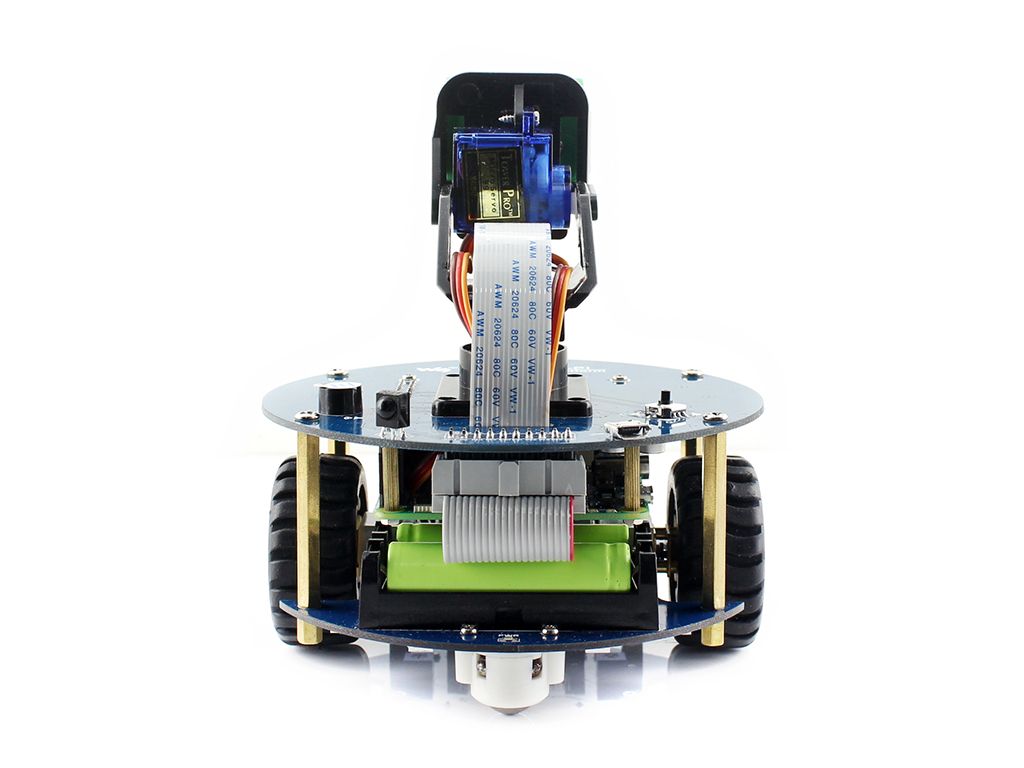
AlphaBot2-Pi robot back view
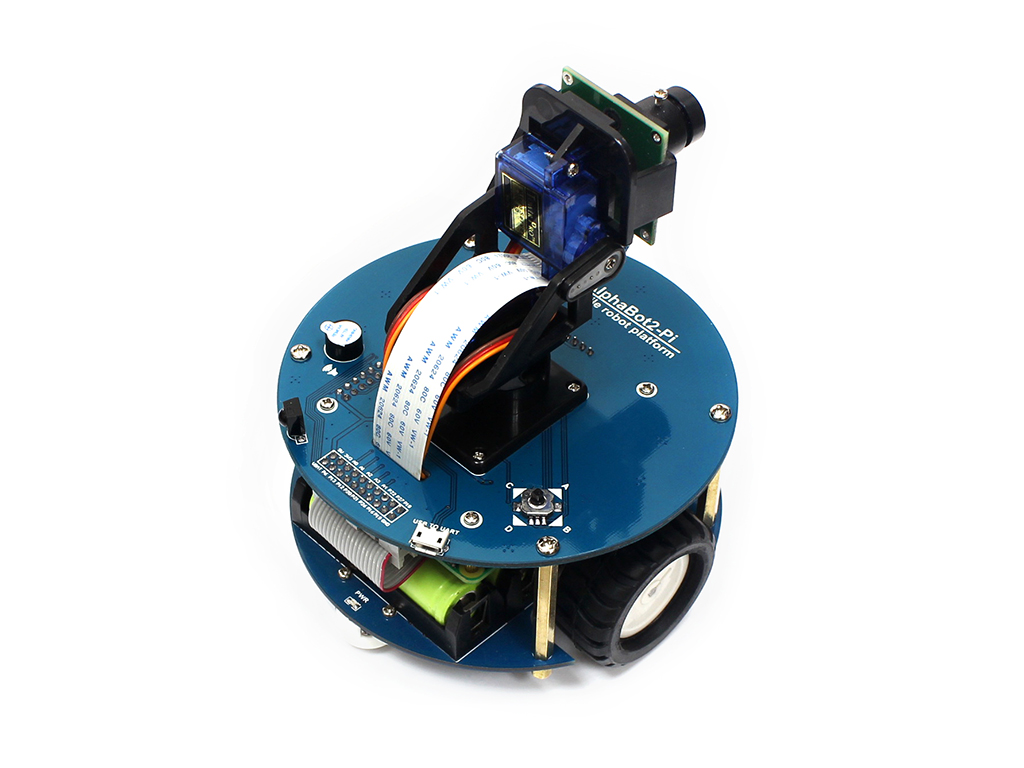
AlphaBot2-Pi robot side view
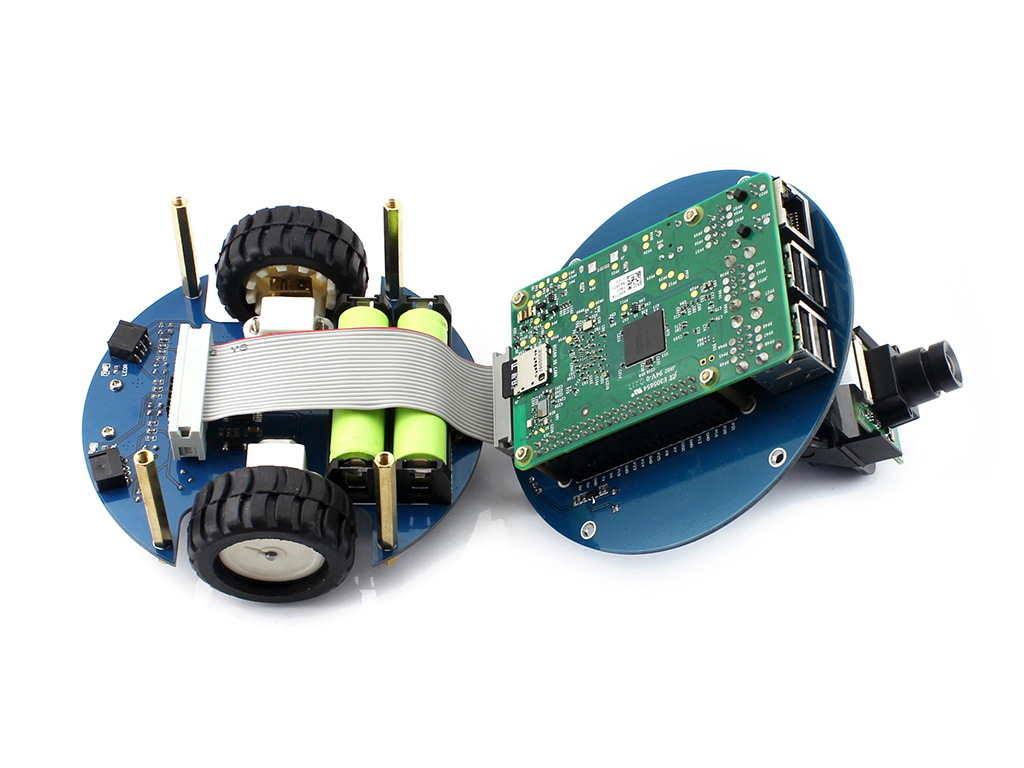
AlphaBot2-Pi robot disassembly

AlphaBot2-Pi robot side view
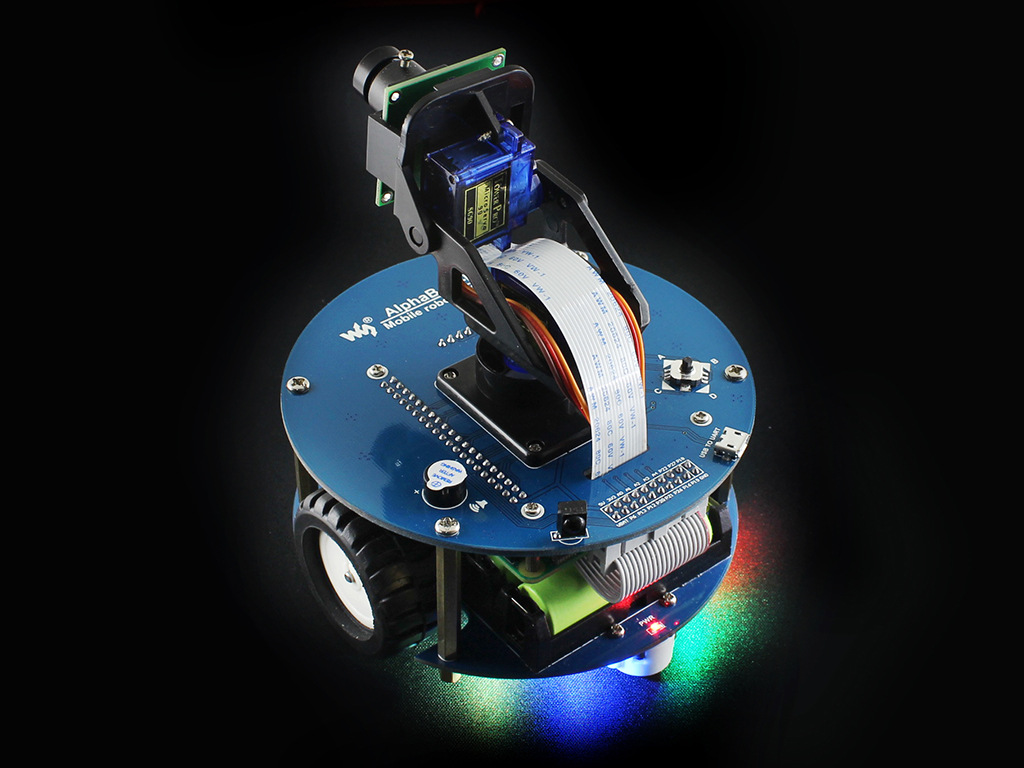
AlphaBot2-Pi robot side view
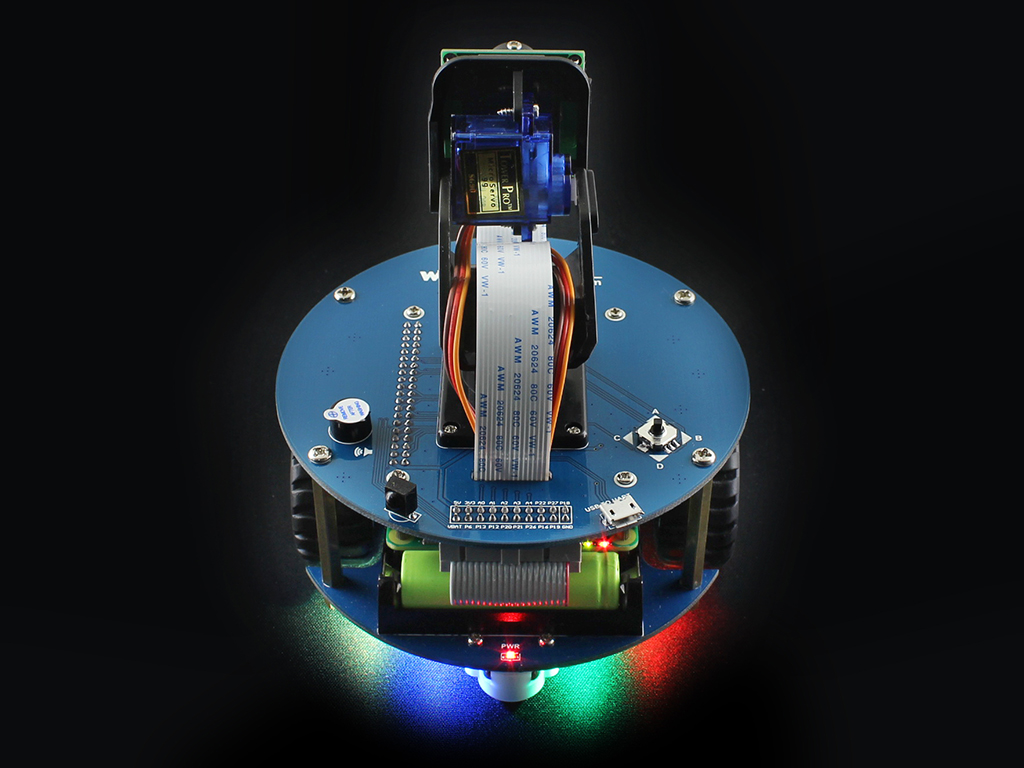
AlphaBot2-Pi robot back view
AlphaBot2-Pi robot bottom view
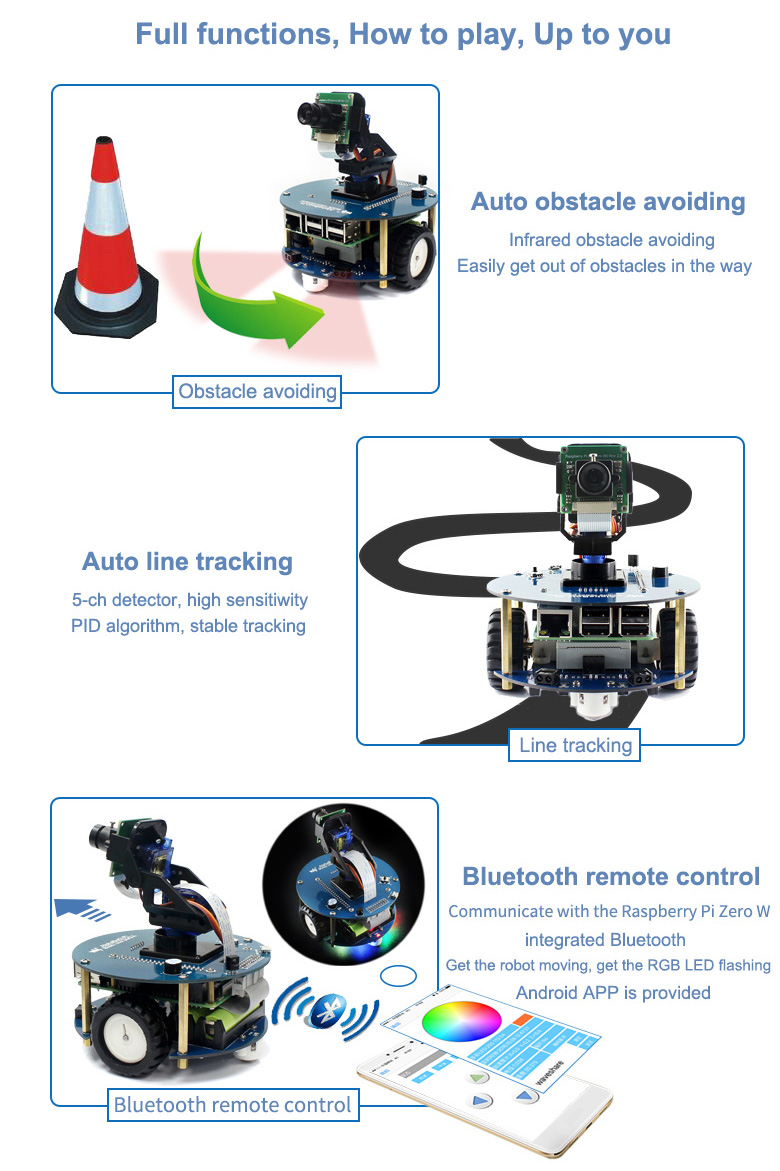
Examples
![]()
AlphaBot2 multi robots line following

AlphaBot2-Pi robot obstacle avoiding
AlphaBot2-Pi robot RGB LED remote control

AlphaBot2-Pi robot video monitor
AlphaBot2-Pi robot Bluetooth control
Note: photos are FOR REFERENCE ONLY, the other boards/modules/accessories are NOT included in the price.
Dimensions
Development Resources
Wiki : www.waveshare.com/wiki/AlphaBot2-Pi
Điện tử ProE cung cấp linh kiện điện tử, thiết bị điện tử , linh kiện IoT chính hãng. ProE cung cấp dịch vụ đặt hàng linh kiện điện tử, thiết bị điện tử chính hãng theo yêu cầu cụ thể của khách hàng. Liên hệ : contact@proe.vn, SĐT: 0938946849
Website: www.proe.vn
Diễn đàn: https://www.facebook.com/groups/278263459284765/
Youtube Chanel: ProE Youtube
Facebook: ProE Facebook
Sản phẩm cùng loại


DOFBOT Pro 3D Depth
Liên hệ

CT7280 Development Kit
Liên hệ

C6490P Development Kit
Liên hệ

Qualcomm Robotics RB6 Platform
Liên hệ

RUBIK Pi 3 QCS6490 Platform
9.500.000₫

TurboX C8550 Development Kit
Liên hệ

TurboX C6490 Development Kit
Liên hệ

{kind=link}
{kind=link}